Характеристики и описание
- Производитель
- Страна производительРоссия
Анализируйте сборки из абсолютно твердых и упругих деталей с помощью модуля Динамика многотельных систем
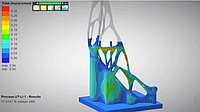
Анализ механизма автомата перекоса, регулирующего положение лопастей винта вертолета. Имитация переходных режимов с жесткими и гибкими лопастями дает понимание полезных рабочих характеристик, таких как деформация лопастей и подъемная сила.
Средство разработки и оптимизации систем из многих телМодуль "Динамика многотельных систем" содержит набор инструментов для разработки и оптимизации механических систем из многих тел с помощью метода конечных элементов (FEA). Этот модуль позволяет моделировать смешанные системы упругих и жестких тел, при этом каждое из тел может совершать существенные линейные или вращательные перемещения. Такой анализ позволяет выявлять критические точки в системах многих тел, давая возможность выполнять более детальный анализ конструкций на уровне составных частей. Модуль Динамика многотельных систем также позволяет свободно анализировать силы, воздействующие на сегменты конструкций, а также напряжения, возникающие в упругих элементах, которые могут привести к разрушению вследствие большой деформации или усталости.
Библиотека соединений
В составе модуля имеется библиотека стандартных соединений, позволяющая легко и надежно задавать связи между различными элементами системы многих тел, элементы которой соединены так, что допускается только определенный вид взаимного перемещения. Соединение связывает два элемента с помощью креплений, при этом один из элементов независимо перемещается в пространстве, тогда как второй ограничен определенным видом движения, в зависимости от типа соединения. Типы соединений в модуле Multibody Dynamics (Динамика многих тел) являются обобщенными до такой степени, что они позволяют моделировать любые типы соединений. Благодаря этому исследователи и инженеры могут разрабатывать точные механические модели систем многих тел, используя следующие типы соединений:
- Призматическое (3D, 2D)
- Шарнирное (3D, 2D)
- Цилиндрическое (3D)
- Винтовое (3D)
- Планарное (3D)
- Шаровое (3D)
- Пазовое (3D)
- Упрощенное пазовое (3D, 2D)
- Неподвижное соединение (2D,3D)
- Дистанционный шарнир (2D,3D)
- Карданный шарнир (3D)
 |
 |
 |
 |
 |
Взаимное перемещение двух компонентов часто ограничивается присутствием или функциями других физических объектов. С целью полного описания и моделирования этих сложных систем можно задавать ограничение и условную блокировку взаимных перемещений в соединениях. Например, в робототехнике относительное перемещение рычагов можно определять как предварительно заданную функцию времени. Соединения также могут быть нагружены пружиной, при этом соответствующие коэффициенты демпфирования можно включить в модуль Multibody Dynamics (Динамика многотельных систем).
Полная универсальность при анализе систем многих телКомпоненты системы, испытывающие деформации, могут моделироваться как упругие, а прочие компоненты или даже их детали могут задаваться как жесткие. Кроме того, при создании и анализе своих конструкций из многих тел пользователь может вводить нелинейные свойства материалов, комбинируя модели в модуле Динамика многотельных систем с модулем Nonlinear Structural Materials (Нелинейные материалы) или с модулем Geomechanics (Геомеханика). В то же время остальные физические явления, которые можно моделировать в среде COMSOL Multiphysics и наборе специализированных прикладных модулей, могут быть связаны с явлениями, описываемыми в модуле Multibody Dynamics (Динамика многих тел), такими как, например, явления теплопередачи или электрические явления.
Можно выполнять анализ динамики многих тел для переходных процессов, анализ в частотной области, анализ собственных частот, а также стационарных режимов. Соединениям могут быть поставлены в соответствие линейные/торсионные пружины с амортизирующими свойствами, приложенные силы и моменты, а также законы движения как функции времени. Возможности анализа и постобработки включают в себя следующее:
- Относительное смещение/поворот двух компонентов и их скорости
- Силы и моменты реакции в соединениях
- Локальная и глобальная системы координат
- Напряжения и деформации в упругих телах
- Анализ усталости критически важных упругих тел путем комбинирования с модулем Fatigue (Усталость)
Взаимное перемещение двух компонентов часто ограничивается присутствием или функциями других физических объектов. С целью полного описания и моделирования этих сложных систем можно задавать ограничение и условную блокировку взаимных перемещений в соединениях. Например, в робототехнике относительное перемещение рычагов можно определять как предварительно заданную функцию времени. Соединения также могут быть нагружены пружиной, при этом соответствующие коэффициенты демпфирования можно включить в модуль Multibody Dynamics (Динамика многотельных систем).
Ключевые особенности
- Соединения можно ограничивать связями для ограничения взаимного относительного перемещения двух соединенных компонентов
- Соединения можно фиксировать для блокировки взаимного относительного перемещения двух соединенных компонентов при указанном значении
- На относительное перемещение в соединении можно наложить условие пружинной нагрузки, либо в равновесном состоянии, либо с предварительной деформацией
- Можно задать условия демпфирования или подсоединения амортизатора для определения потерь при относительном перемещении в соединении
- Соединения может быть необходимо закреплять для задания взаимного относительного перемещения двух соединенных компонентов
- Для определенных типов соединений можно добавлять потери на трение: для призматических, петлевых, цилиндрических, винтовых, плоских соединений и для шаровых шарниров.
- Силы и моменты могут прикладываться к соединениям всех типов в местах крепления компонентов
- Возможен запуск механизмов перемещения и жесткого вращения с заданными скоростями вокруг заданного центра вращения
Область применения
- Аэрокосмическая промышленность
- Автомобильная промышленность
- Динамика двигателей
- Мехатроника
- Робототехника
- Биомеханика
- Биомедицинские приборы
- Динамика автомобиля
- Общее динамическое моделирование механических узлов
Отзывы о продавце
Об этом продавце пока что нет отзывов.
Покупают вместе у этого продавца



















Доставка
 Самовывоз
Самовывоз Самовывоз
Самовывоз
Оплата и гарантии
 Наличными
Наличными
Похожее у других продавцов